Fischler and Bollesの手法で実装してみた
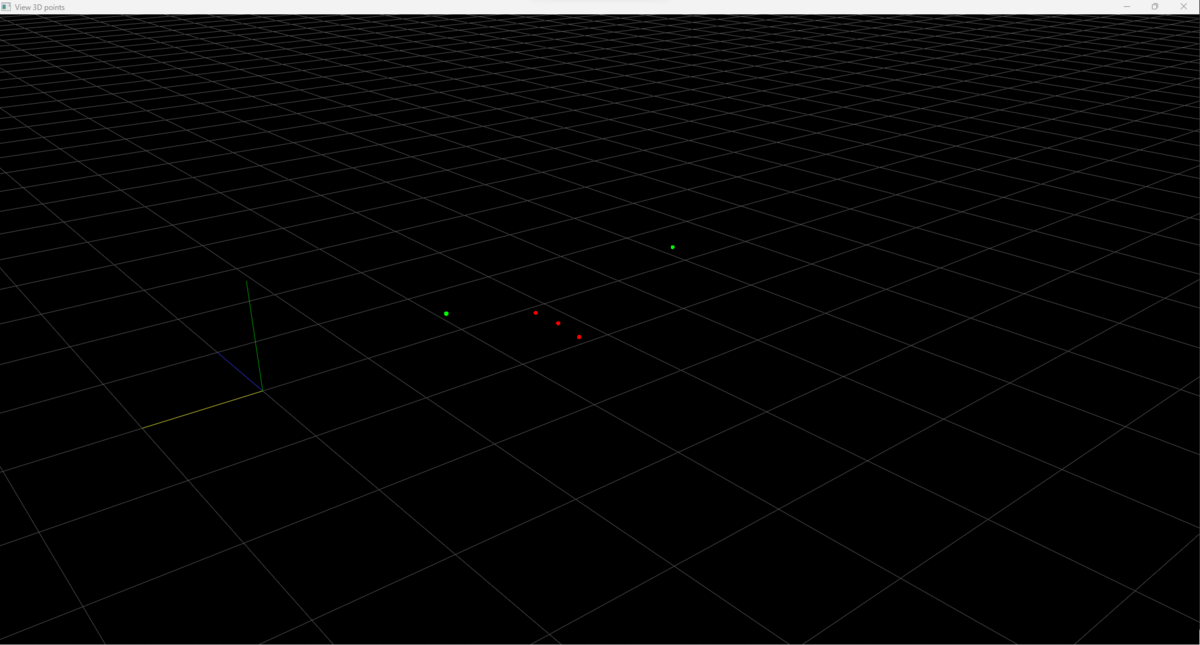
FischlerとBolles*1の方法でカメラ位置を計測するプログラムを実装した。実行すると三次元空間位置が赤点、計算されたカメラ位置が緑点で表示される。以下の例の場合、カメラ位置の候補が2個あるので緑点が2個表示されていることが確認できる。カメラの撮影方向などの前提情報を使って本物の解を選択することもできるが、不明な場合はいくつかの三次元空間位置と対応する画像位置のペアを用意する必要がある。
import sys
import numpy as np
from pyqtgraph.Qt import QtCore, QtGui
import pyqtgraph.opengl as gl
def main():
mtx = np.array([[1200.0,0 ,1020.0 ],
[0 ,1200.0,540.0 ],
[0 ,0 ,1 ]])
img_pos = np.array([[ 600.0 ,850.0 ],
[1000.0 ,850.0 ],
[1300.0 ,830.0]])
real_pos = np.array([[0.7 ,-4.0 ,-0.91],
[1.2 ,-4.1 ,-0.91],
[1.6 ,-4.1 ,-0.91]])
cam_pos, ans_num = calcPoseP3P(img_pos,real_pos,mtx)
cam_pos = cam_pos[0:ans_num,:]
print("Camera Position")
print(cam_pos)
color_data0 = np.zeros([len(real_pos),3])
for i in range(len(real_pos)):
color_data0[i,0] = 1
color_data1 = np.zeros([len(cam_pos),3])
for i in range(len(cam_pos)):
color_data1[i,1] = 1
point_data = np.vstack([real_pos,cam_pos])
color_data = np.vstack([color_data0,color_data1])
v = PlotObject()
v.plotGLPlot(point_data,color_data)
v.show()
sys.exit(v.App.exec_())
def calcPoseP3P(pixel,pos,mtx):
fx = mtx[0,0]
fy = mtx[1,1]
Cu = mtx[0,2]
Cv = mtx[1,2]
q = np.zeros([len(pixel),3])
for i in range(len(pixel)):
q[i,0] = (pixel[i,0] - Cu)/fx
q[i,1] = (pixel[i,1] - Cv)/fy
q[i,2] = 1
q[i,:] = q[i,:]/np.linalg.norm(q[i,:])
a = np.linalg.norm(pos[0,:]-pos[1,:])
b = np.linalg.norm(pos[1,:]-pos[2,:])
c = np.linalg.norm(pos[2,:]-pos[0,:])
ca = q[0,:]@q[1,:]
cb = q[1,:]@q[2,:]
cc = q[2,:]@q[0,:]
ca2 = ca*ca
cb2 = cb*cb
cc2 = cc*cc
B4 = 4*b**2*c**2*ca2 - (a**2-b**2-c**2)**2
B3 = -4*c**2*(a**2+b**2-c**2)*ca*cb - 8*b**2*c**2*ca2*cc + 4*(a**2-b**2-c**2)*(a**2-b**2)*cc
B2 = 4*c**2*(a**2-c**2)*cb2 + 8*c**2*(a**2+b**2)*ca*cb*cc + 4*c**2*(b**2-c**2)*ca2 - 2*(a**2-b**2-c**2)*(a**2-b**2+c**2) - 4*(a**2-b**2)**2*cc2
B1 = -8*a**2*c**2*cb2*cc - 4*c**2*(b**2-c**2)*ca*cb - 4*a**2*c**2*ca*cb + 4*(a**2-b**2)*(a**2-b**2+c**2)*cc
B0 = 4*a**2*c**2*cb2 - (a**2-b**2+c**2)**2
s = SolveQuarticEquation(B4,B3,B2,B1,B0)
ans_num = 0
cam_pos = np.zeros([4,3],dtype="float32")
for i in range(len(s)):
if np.abs(s[i].imag) < 0.00000001:
u = s[i].real
v = -((a**2-b**2-c**2)*u**2+2*(b**2-a**2)*cc*u+(a**2-b**2+c**2))/(2*c**2*(ca*u-cb))
x = a * a / (u * u + v * v - 2.0 * u * v * ca)
y = b * b / (1 + v * v - 2.0 * v * cb)
z = c * c / (1 + u * u - 2.0 * u * cc)
if (x > 0.0):
s1 = np.sqrt(x)
s2 = u * s1
s3 = v * s1
P1 = q[0,:]*s2
P2 = q[1,:]*s3
P3 = q[2,:]*s1
P12 = P2-P1
P13 = P3-P1
P23 = P3-P2
zv = np.array(np.cross(P12,P13),dtype="float32")
zv = zv/np.linalg.norm(zv)
xv = np.array(P12,dtype="float32")
xv = xv/np.linalg.norm(xv)
yv = np.array(np.cross(xv,zv),dtype="float32")
yv = yv/np.linalg.norm(yv)
Rotc = np.zeros([3,3])
Rotc[:,0] = xv
Rotc[:,1] = yv
Rotc[:,2] = zv
P12b = pos[1,:]-pos[0,:]
P13b = pos[2,:]-pos[0,:]
zb = np.array(np.cross(P12b,P13b),dtype="float32")
zb = zb/np.linalg.norm(zb)
xb = np.array(P12b,dtype="float32")
xb = xb/np.linalg.norm(xb)
yb = np.array(np.cross(xb,zb),dtype="float32")
yb = yb/np.linalg.norm(yb)
Rota = np.zeros([3,3])
Rota[:,0] = xb
Rota[:,1] = yb
Rota[:,2] = zb
t = Rota@Rotc.T@(-P1.T)+pos[0,:].T
cam_pos[ans_num,:] = t
ans_num = ans_num + 1
return cam_pos , ans_num
def SolveCubicEquation(a,b,c,d):
if a == 0.0:
return 0
else:
A = b/a
B = c/a
C = d/a
p = B-A*A/3.0
q = 2.0*A*A*A/27.0-A*B/3.0+C
D = q*q/4.0+p*p*p/27.0
if D < 0.0:
x = np.zeros(3)
theta = np.arctan2(np.sqrt(-D),-q*0.5);
x[0] = 2.0*np.sqrt(-p/3.0)*np.cos(theta/3.0)-A/3.0
x[1] = 2.0*np.sqrt(-p/3.0)*np.cos((theta+2.0*np.pi)/3.0)-A/3.0
x[2] = 2.0*np.sqrt(-p/3.0)*np.cos((theta+4.0*np.pi)/3.0)-A/3.0
else:
x = np.zeros(3,dtype=complex)
u = Cuberoot(-q*0.5+np.sqrt(D))
v = Cuberoot(-q*0.5-np.sqrt(D))
x[0] = u+v-A/3.0
x[1] = complex(-0.5*(u+v)-A/3.0,np.sqrt(3.0)*0.5*(u-v))
x[2] = complex(-0.5*(u+v)-A/3.0,-np.sqrt(3.0)*0.5*(u-v))
return x
def SolveQuarticEquation(a,b,c,d,e):
if a == 0.0:
return 0
else:
x = np.zeros(4,dtype=complex)
A = b/a
B = c/a
C = d/a
D = e/a
p = -6.0*(A/4.0)**2.0+B
q = 8.0*(A/4.0)**3.0-2.0*B*A/4.0+C
r = -3.0*(A/4.0)**4.0+B*(A/4.0)**2.0-C*A/4.0+D
t_temp = SolveCubicEquation(1.0,-p,-4.0*r,4.0*p*r-q*q)
t = t_temp[0].real
m = Squreroot(t-p)
x[0] = (-m+Squreroot(-t-p+2.0*q/m))*0.5-A/4.0
x[1] = (-m-Squreroot(-t-p+2.0*q/m))*0.5-A/4.0
x[2] = (m+Squreroot(-t-p-2.0*q/m))*0.5-A/4.0
x[3] = (m-Squreroot(-t-p-2.0*q/m))*0.5-A/4.0
return x
def Cuberoot(x):
if x > 0.0:
return (x)**(1.0/3.0)
else:
return -(-x)**(1.0/3.0)
def Squreroot(x):
r = np.sqrt(x.real*x.real+x.imag*x.imag)
theta = np.arctan2(x.imag,x.real)
if x.imag == 0.0:
if x.real > 0.0:
y = np.sqrt(r)
else:
y = complex(0,np.sqrt(r))
else:
if theta < 0.0:
theta = theta + 2.0*np.pi
y = complex(np.sqrt(r)*np.cos(theta*0.5),np.sqrt(r)*np.sin(theta*0.5))
return y
class PlotObject(gl.GLViewWidget):
sigUpdate = QtCore.Signal(float, float)
App = None
def __init__(self, app=None):
if self.App is None:
if app is not None:
self.App = app
else:
self.App = QtGui.QApplication([])
super(PlotObject,self).__init__()
self.Gridxy = gl.GLGridItem()
self.Axes = gl.GLAxisItem()
self.Gridxy.setSize(100,100,3)
self.Gridxy.setSpacing(1,1,0)
self.Gridxy.translate(0, 0, 0)
self.Poss = []
self.Cols = []
self.Sizes = []
self.GlobalInds = []
self.Plot = gl.GLScatterPlotItem()
self.addItem(self.Plot)
self.addItem(self.Gridxy)
self.addItem(self.Axes)
self._downpos = []
self.setWindowTitle('View 3D points')
def mousePressEvent(self, ev):
super(PlotObject, self).mousePressEvent(ev)
self._downpos = self.mousePos
def mouseReleaseEvent(self, ev):
super(PlotObject, self).mouseReleaseEvent(ev)
self._prev_zoom_pos = None
self._prev_pan_pos = None
def plotGLPlot(self,pos_input,color_input):
pos_data = np.asarray(pos_input)
length = len(pos_data)
colors = [None for k in range(length)]
poss = np.array([0,0,0])
cols = np.array([0,0,0,0])
for k in range(length):
rgb_val = np.zeros(3,dtype=float)
rgb_val[0] = color_input[k,0]
rgb_val[1] = color_input[k,1]
rgb_val[2] = color_input[k,2]
colors[k] = (rgb_val[0],rgb_val[1],rgb_val[2])
self.Poss.append([pos_data[k,0], pos_data[k,1], pos_data[k,2]])
self.Cols.append([rgb_val[0], rgb_val[1], rgb_val[2]])
self.Sizes.append(1)
self.GlobalInds.append(k)
possb = np.array([pos_data[k,0], pos_data[k,1], pos_data[k,2]])
poss = np.vstack([poss,possb])
colsb = np.array([rgb_val[0], rgb_val[1], rgb_val[2],1])
cols = np.vstack([cols,colsb])
self.Plot = gl.GLScatterPlotItem()
self.Plot.setData(pos=poss, size=0.05, color=cols, pxMode=False)
self.addItem(self.Plot)
self.show()
if __name__ == '__main__':
main()




